IQR een simulatiesysteem voor het grafisch ontwerpen en controle op grote schaal neuronale modellen.
IQR is een tool voor het maken en uitvoeren van simulaties van grootschalige neurale netwerken.
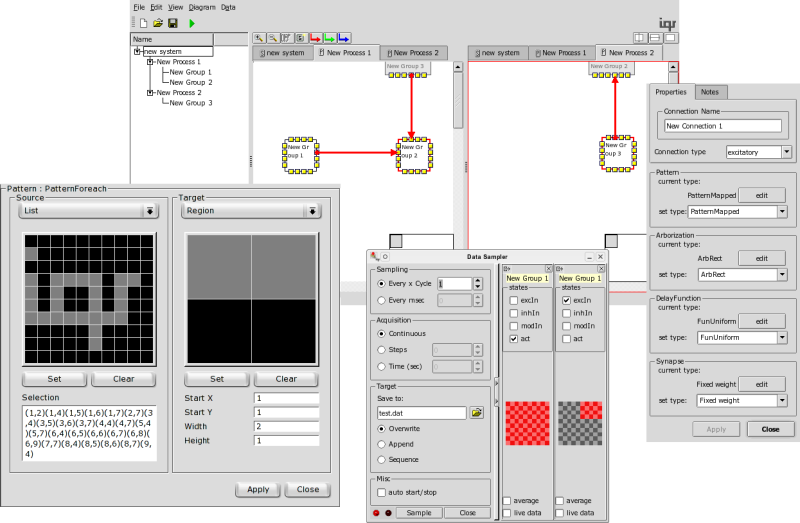
Via grafische gebruikersinterface IQR's (GUI) kan de gebruiker:
- Het ontwerp van het systeem
- De controle van de werking van de simulatie
- Verandering parameters van het model tijdens runtime
Aangezien verbindingen tussen groepen neuronen is een hoeksteen modelleren, IQR biedt flexibele en toch eenvoudig te gebruiken en compact methoden om een breed scala van connectiviteitspatronen definiëren.
Een browser op de linkerkant van het hoofdvenster kunt u snel toegang tot onderdelen van het model. Schema's kunnen worden afgedrukt of opgeslagen.
IQR biedt meerdere instrumenten om toezicht te houden en te communiceren met toestanden van elementen van het model. Data acquisitie omvat frequentie en duur bemonstering en staten van geselecteerde elementen kunnen via de Data Sampler gered worden. Modellen in IQR worden opgeslagen in een format op basis van de XML-standaard, en kan dus worden omgezet in een groot aantal andere beschrijving grammatica's voor neuronale modellen.
IQR geleverd met een breed scala van vooraf gedefinieerde interfaces voor hardware-apparaten. Zij omvatten modules om Khepera en Koala robots (K-Team SA, Lausanne), Lego Mindstorms, en de luchtballon robot gebruikt in de AMOTH project te beheersen. Modules kunnen worden uitgevoerd gesynchroniseerd, of hun thread, onafhankelijk van de update snelheid van de belangrijkste simulatie.
Simulaties in de IQR draaien met een snelheid voldoende is voor real-time controle van robots. De onderstaande gegevens zijn verkregen op een AMD Athlon 1 GHz, 768 MB RAM-geheugen met behulp van lineaire drempel neuronen.
Reacties niet gevonden