Software screenshot:
Software informatie:
Versie: 1.0.2
Upload datum: 15 Apr 15
Ontwikkelaar: Dihav
Licentie: Gratis
Populariteit: 92
Maat: 11911 Kb
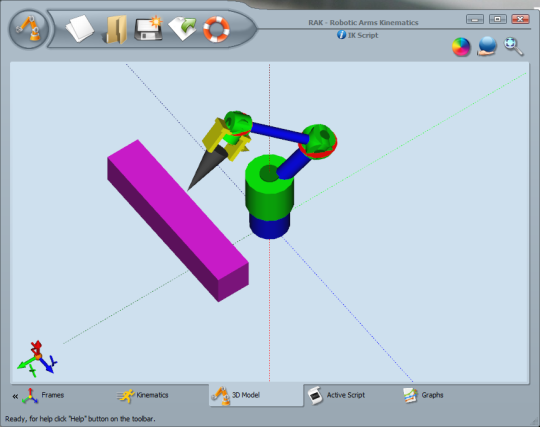
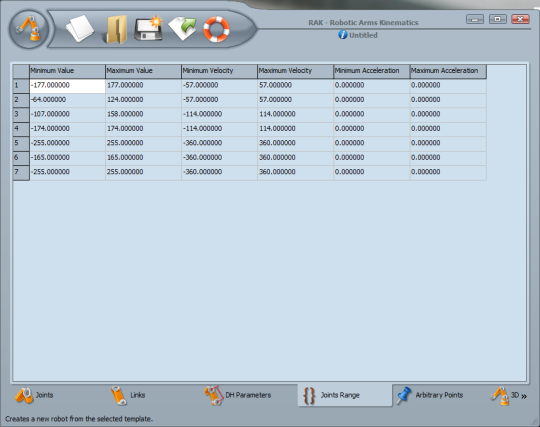
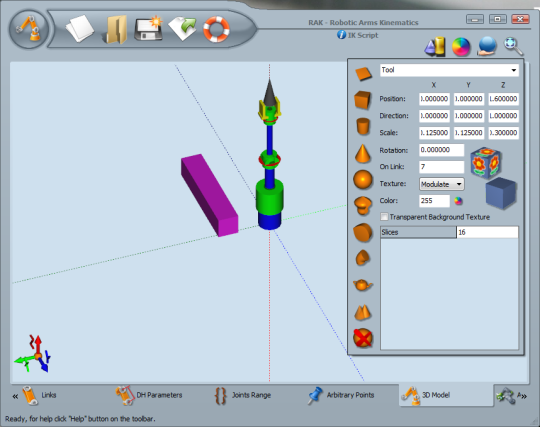
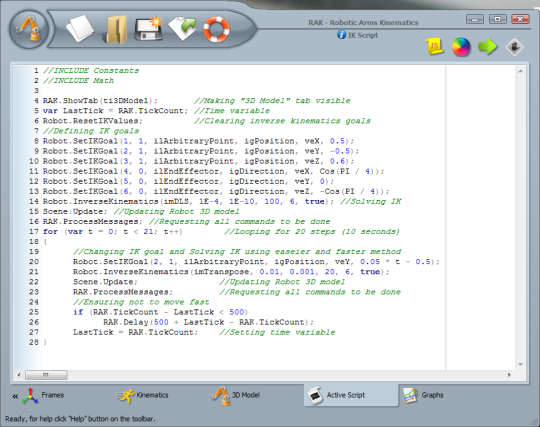
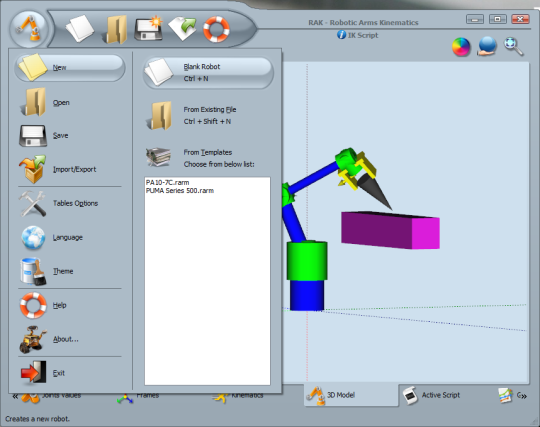
RAK is een programma voor het modelleren van robotarmen en de berekening van hun kinematica.
Dit programma kan open lus, enkele keten robots te simuleren.
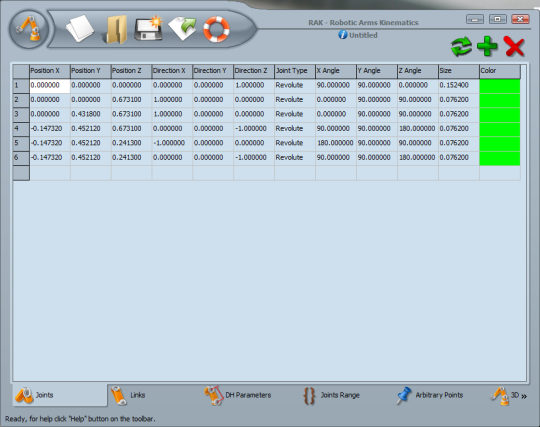
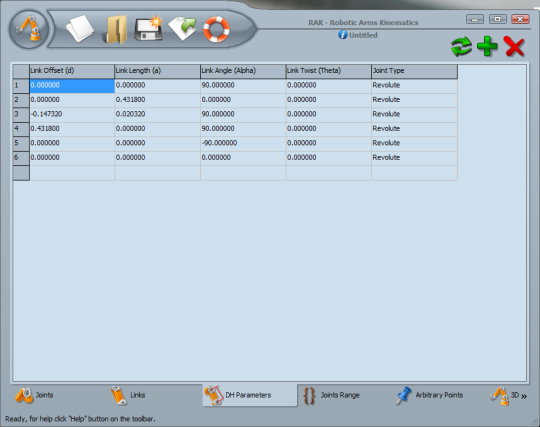
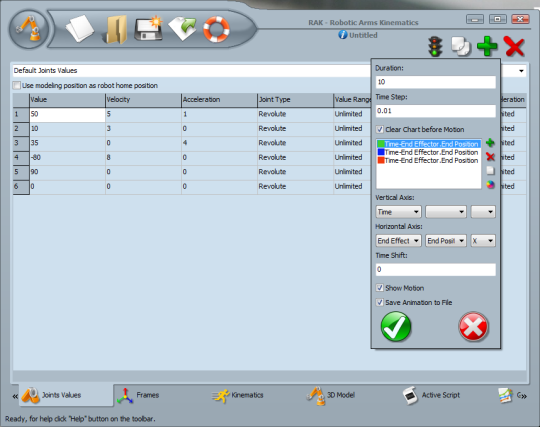
U kunt een robot modelleren door zijn gewrichten posities of Denavit-Hartenberg (DH) parameters.
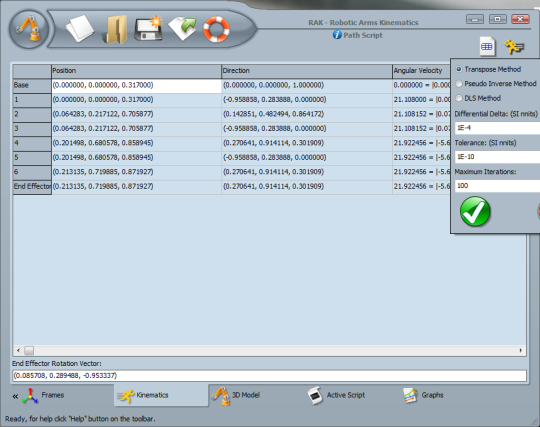
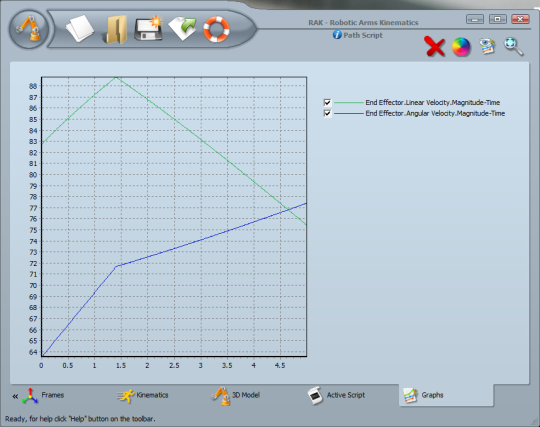
U kunt de kinematica en inverse kinematica van de robot te berekenen door dit programma.
Er is ook een programmagebied kunnen programmeren en besturen echte robots.
Reacties niet gevonden